 NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
Data-glove for virtual operations
Key Investigators
- Endre Vecsernyés (University of Szeged)
- Attila Nagy (University of Szeged)
- Kitti Farkas (University of Szeged)
- Bence Horvath (University of Szeged)
- Kyle Sunderland (Queen’s University)
- Eleni Siampli (Children’s National)
- Andras Lasso (Queen’s University)
Project Description
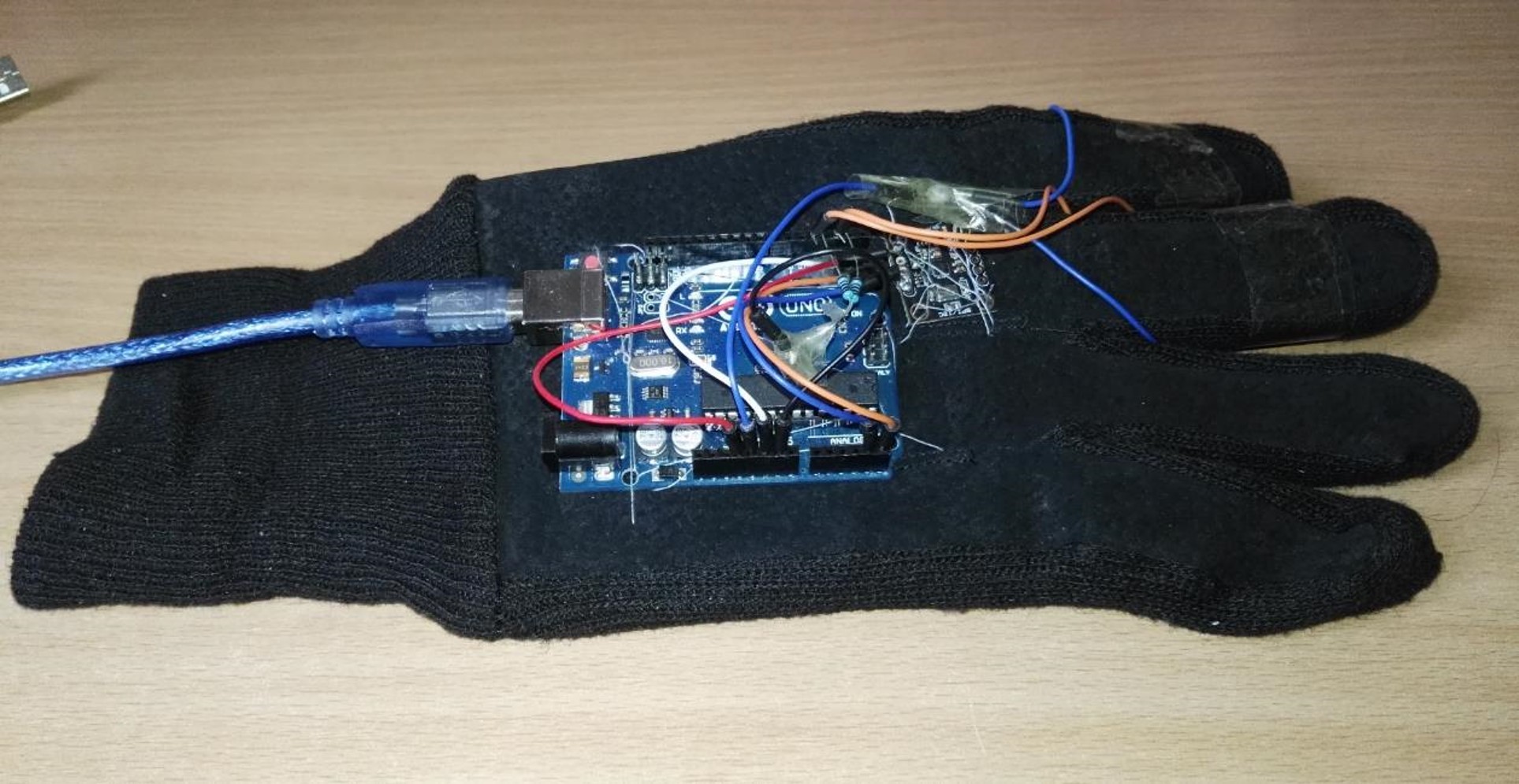
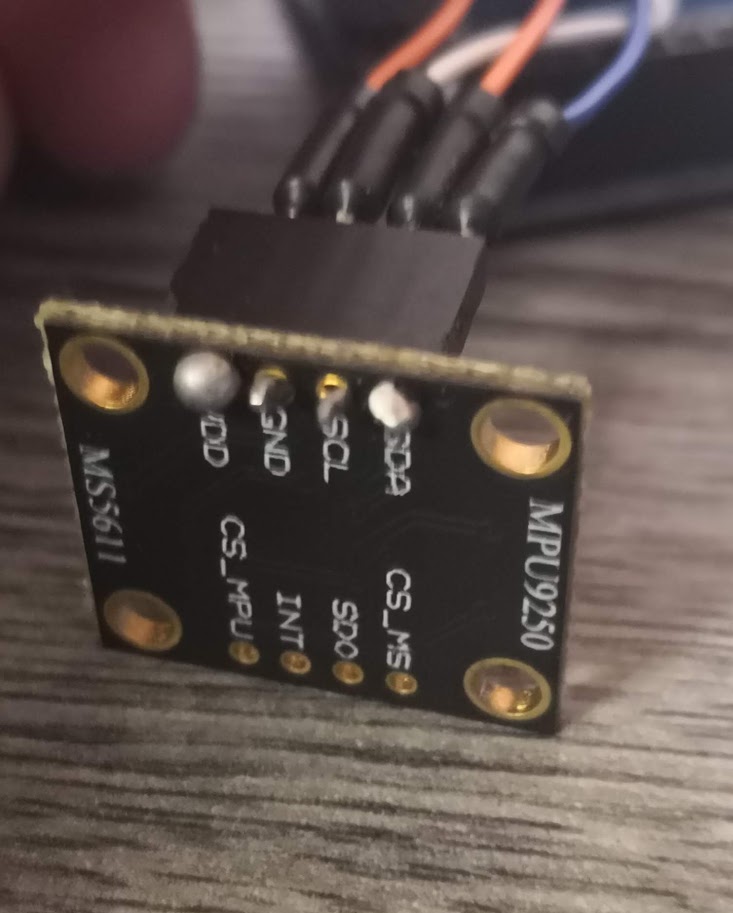
We built a data-glove that tracks hand movements. Our goal is to connect it to Slicer with OpenIGTLink or with the Plus toolkit. The glove has a simple IMU (with 3-axis gyroscope and 3-axis accelerometer /MPU9250/) and a processing unit (Arduino Uno).
Objective
- Stable connections between the glove and the Slicer
Approach and Plan
- Making connection between the glove and Slicer with Plus toolkit
- Plans for the future
Progress and Next Steps
- The glove can be used as an orientation sensor.
- For virtual operations we need a different approach and decvice. (For example Leap Motion)
Illustrations

Result:

Background and References
- Previous work in Slicer using PhidgetSpatial 3/3/3 sensor: http://perk.cs.queensu.ca/sites/perkd7.cs.queensu.ca/files/Kotwicz2014.pdf
- MPU9250 Datasheet: https://cdn.sparkfun.com/assets/learn_tutorials/5/5/0/MPU9250REV1.0.pdf
- Arduino Uno website: https://store.arduino.cc/arduino-uno-rev3
- MPU9250-Arduino library: https://github.com/bolderflight/MPU9250
- Code for the orientation sensor: https://github.com/riduid/MPU9250-with-Arduino
- Leap Motion website: https://www.leapmotion.com/