 NA-MIC Project Weeks
NA-MIC Project Weeks
Back to Projects List
Bullseye - Computer Vision for the glenoid implant in total shoulder arthroplasty
Key Investigators
- David M. Burns, MD, PhD(c) (Sunnybrook Research Institute)
- Samuel C.P. Newhook, BASc (Sunnybrook Research Institute)
- Cari Whyne, PhD (Sunnybrook Research Institute)
Project Description
Positioning of the glenoid component in total shoulder arthroplasty is a challenging and important step for the longevity and functional outcomes of the surgery. This project aims to provide intraoperative validation for implant positioning.
Objective
- Enable automatic validation of glenoid implant placement using 3D scanning technology (Einscan Pro). Surgeons must be able to take a scan and receive a validation results within 3 minutes of guidewire placement.
- Automatic import of optical scan into slicer. As it stands, the optical image must be taken and loaded manually.
Approach and Plan
- Targeting the automation of intra-operative image processing steps. These are as follows:
- Segmentation of tracker and glenoid from intra-operative optical image
- Pre-alignment for optical tracker registration
- Optical tracker registration (surface based)
- Validation of tracker registration (visual / numeric)
- Pre-alignment for glenoid optical image to pre-operative mesh model
- Glenoid registration (surface based)
- Validation of glenoid registration (visual / numeric)
- Visualize prediction
- Define data flow for each step (inputs and outputs)
- Create modules for each step or grouping of 2-3 steps
- Create a workflow module for linking steps (handle workflow logic)
Progress and Next Steps
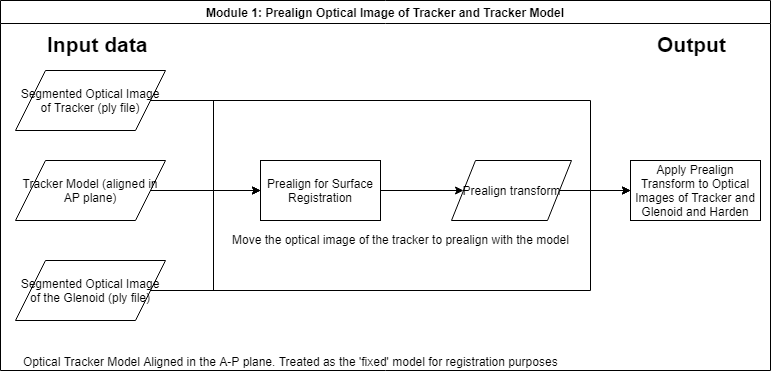
Created simple data flow diagram for the first module. Next is to sketchup module design and implement in Slicer.
Notes
Fully constraining the optical tracker when performing surface registration from the optical image to the model is important. Some issues with the shape of the tracker were discussed incuding the need for at least two clear faces to be visible when taking the optical images. Sharp angles subtended between the faces are important for constraining, however, with sharp edges and a single fixed scan it is difficult to image both faces clearly.
Illustrations
Data Flow Diagram for Module 1: Prealign optical image of tracker and tracker model
{kind=link}
Background and References
- Source code: https://github.com/samnewhook/bullseye-intraop